Dual camera frame
During our first few years of making mosaics (circa 2001-2006), all of the data were acquired with video cameras. There was an iteration of quality from digital video (DV) to high-definition video (HDV), but it became clear early on that the spatial resolution of these formats was not as high as desired by most end users of the mosaics. Thus, when the Nikon D200 was announced at the end of 2005, we decided to integrate DSLR imagery into our acquisition strategy. The image quality and resolution of the D200 was quite superior to video, but in those early years the D200 battery life and storage card technology were not up to the task of being the sole-source of imagery for the mosaics we were trying to make. The dual-camera strategy was born.
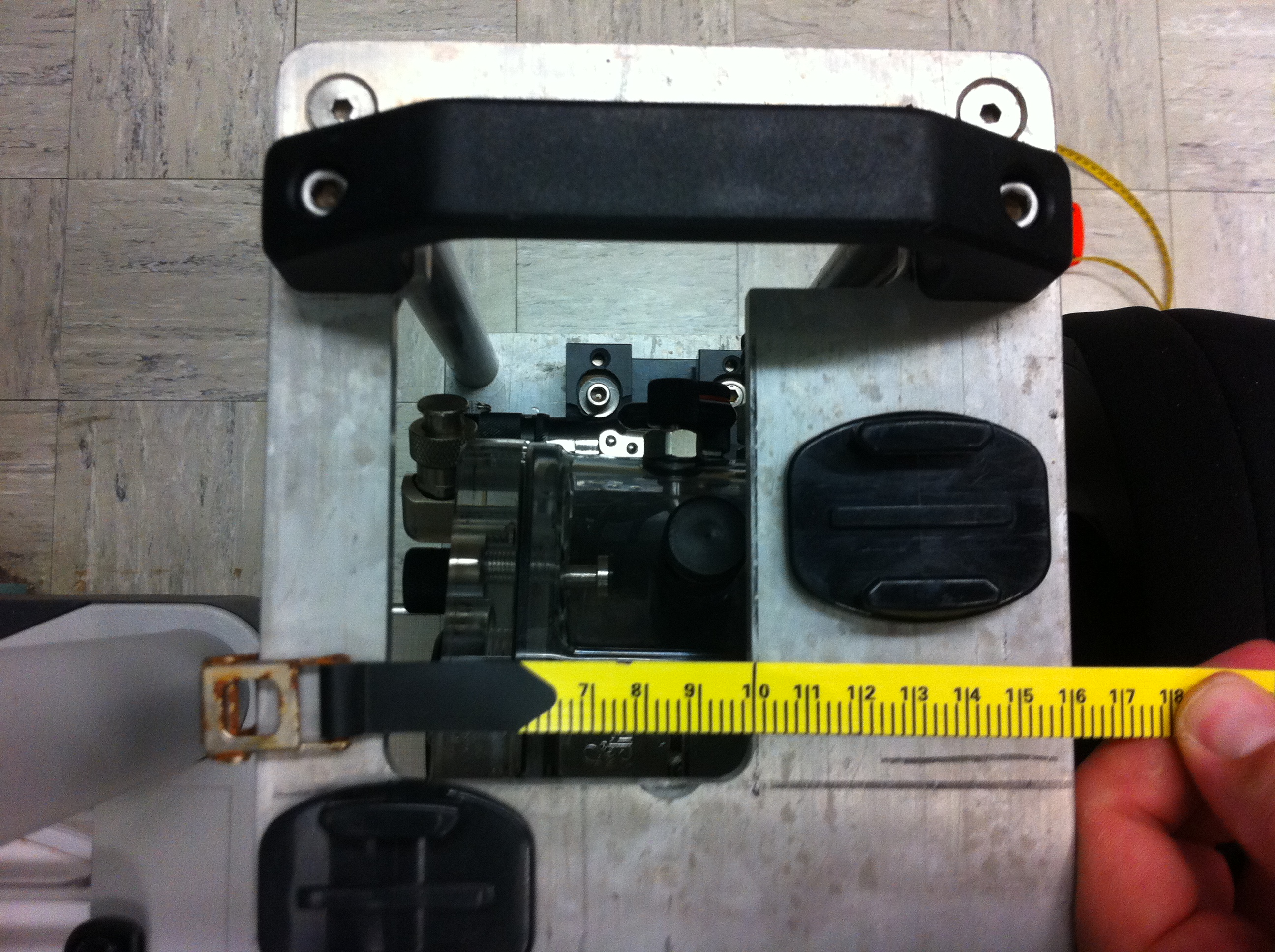
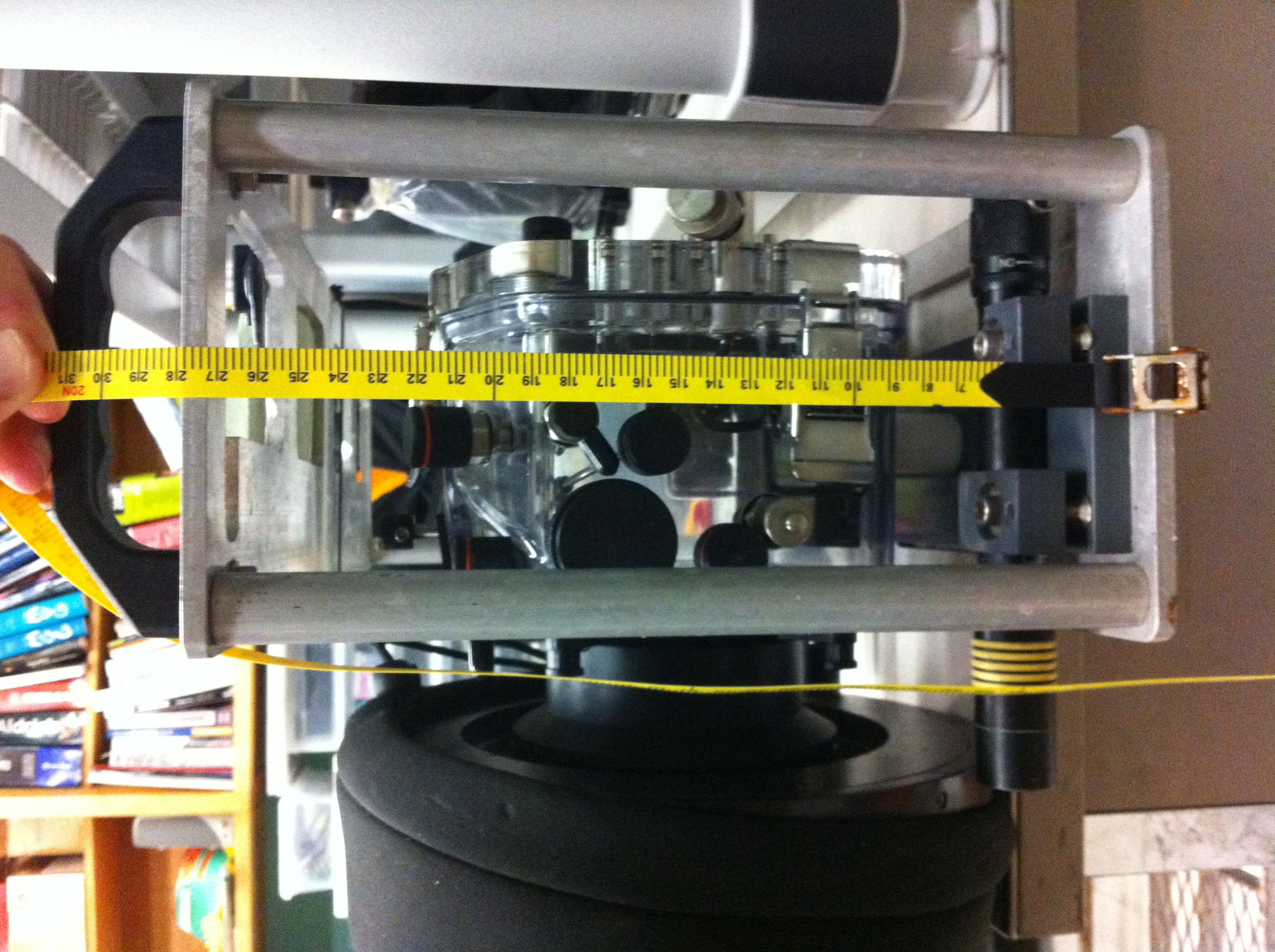
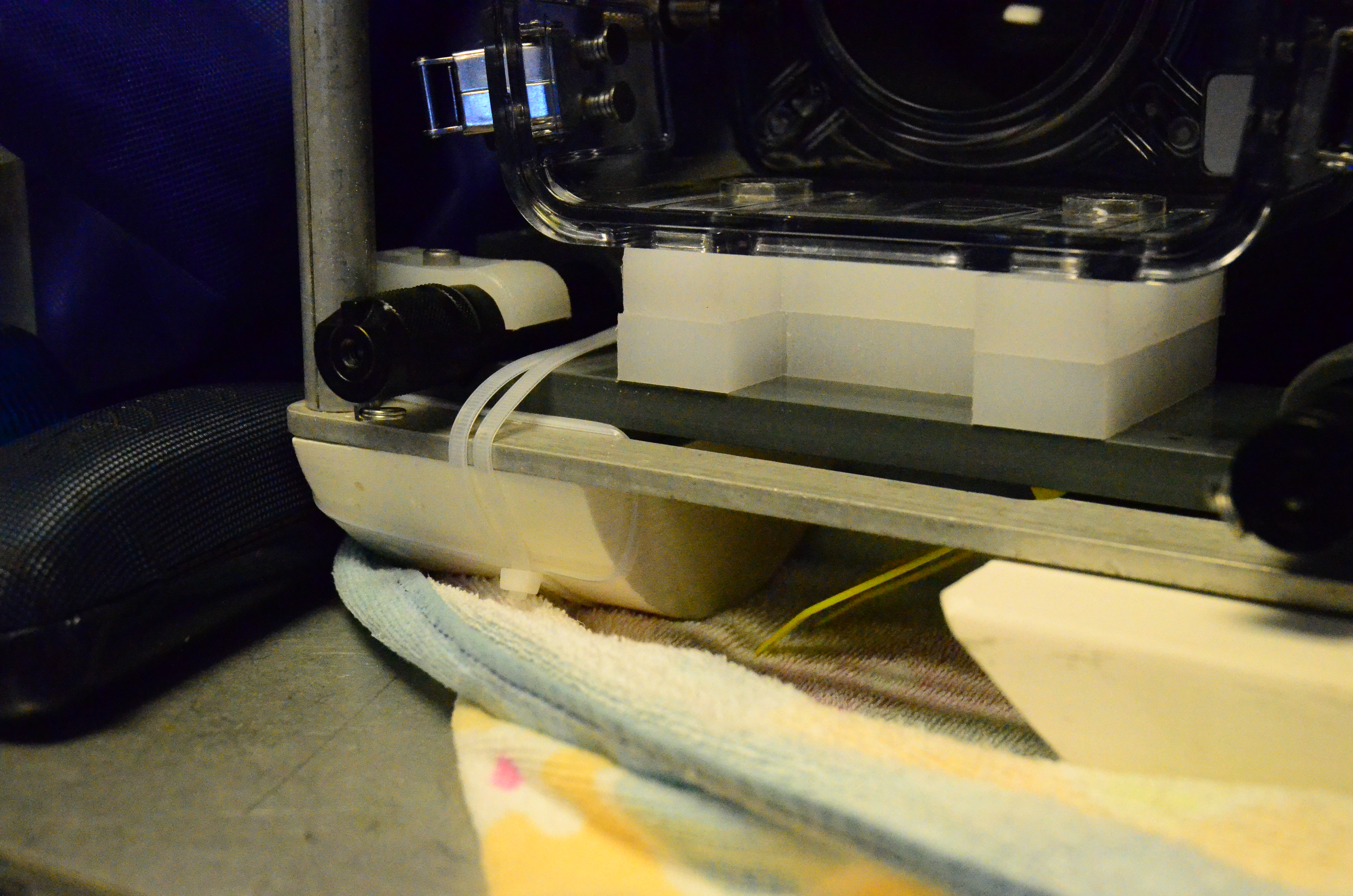
Gintert et al. (2009) described the dual camera strategy in detail, but, briefly, the idea was to have one camera set at wide field of view, to capture images with high (~80%) overlap between frames, and to have a second camera with narrower field of view to acquire high-resolution images with little overlap. The frame shown here achieved two objectives. First, it allowed mounting two cameras in as small a space as practical. Second, it allowed easily swapping out cameras without having to completely rebuild the frame. This feature was very important back in 2006-2012 time frame, when camera (and battery) technology was improving rapidly, so frequent camera upgrades were important because they produced much better performance. Nowadays (2020) this is a less critical feature as cameras are all quite excellent and turnover less critical.
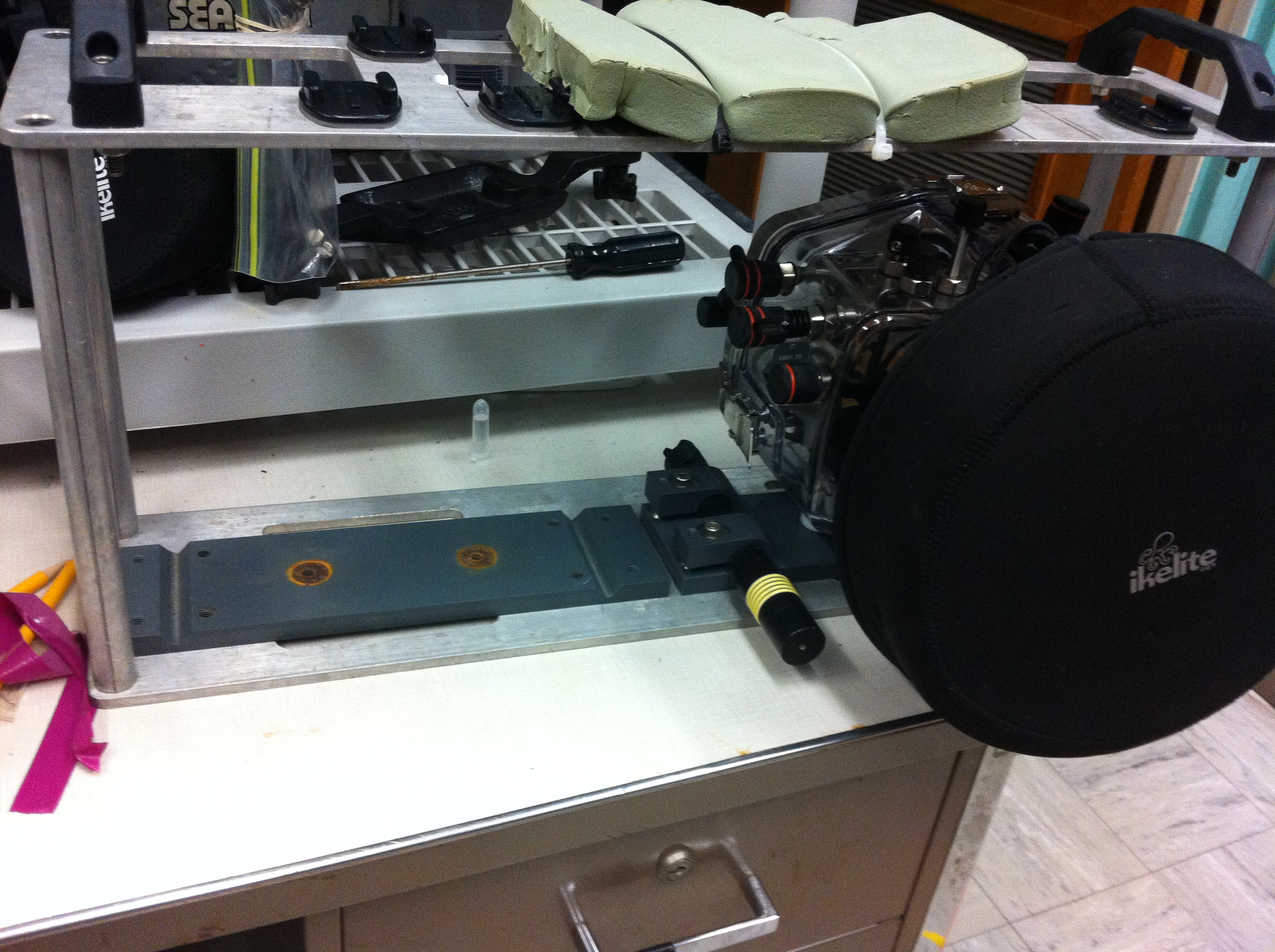
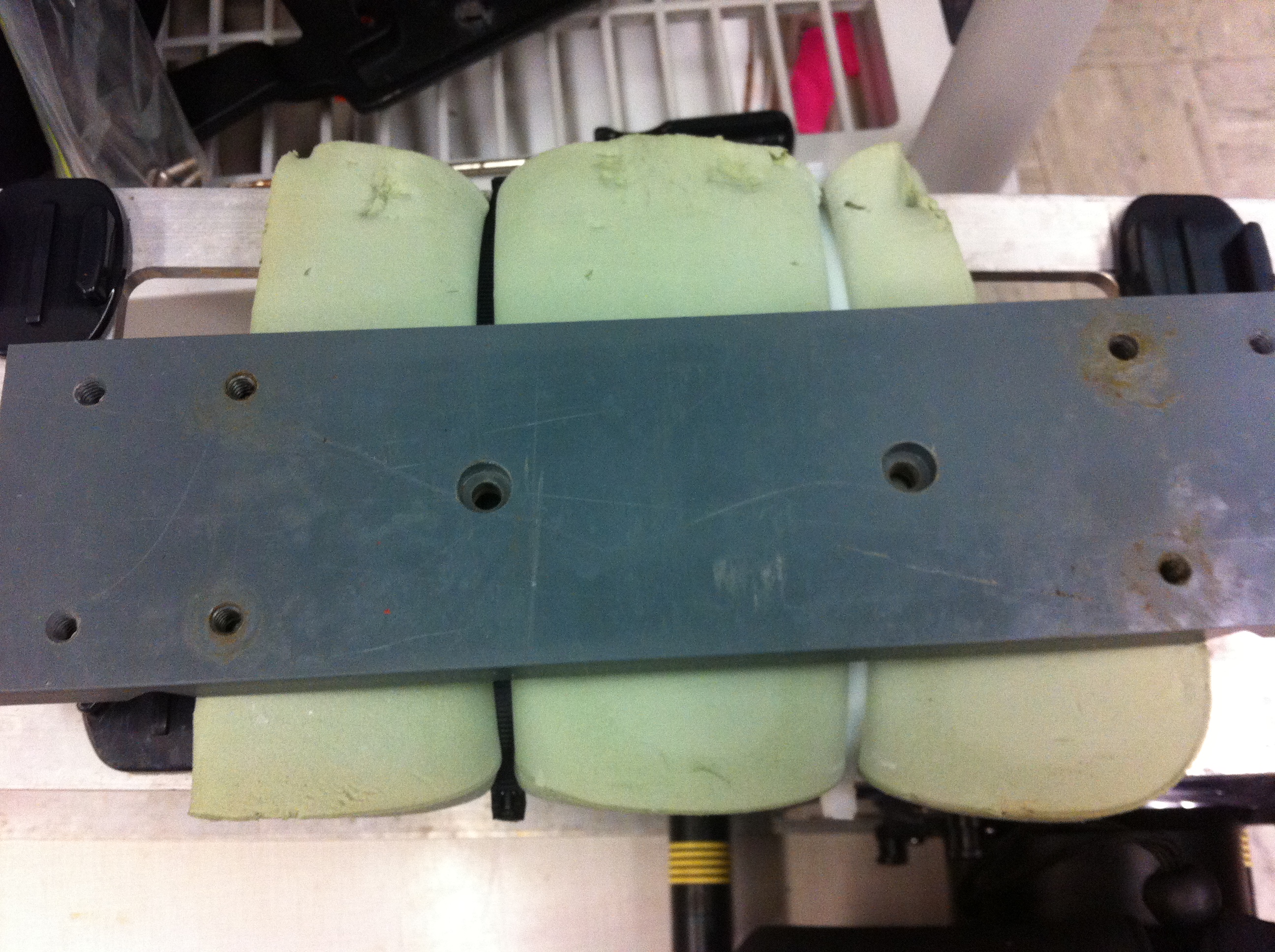
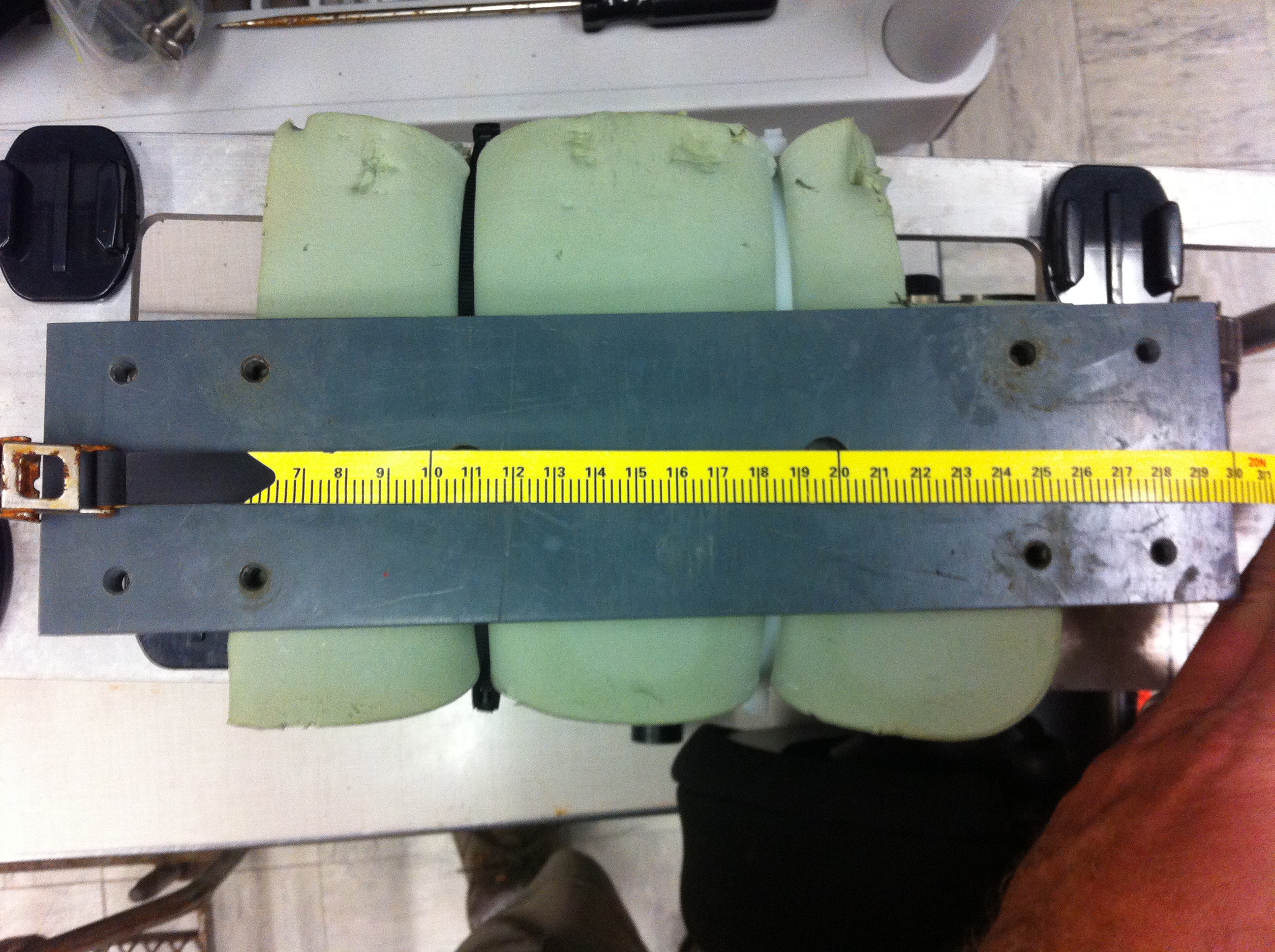
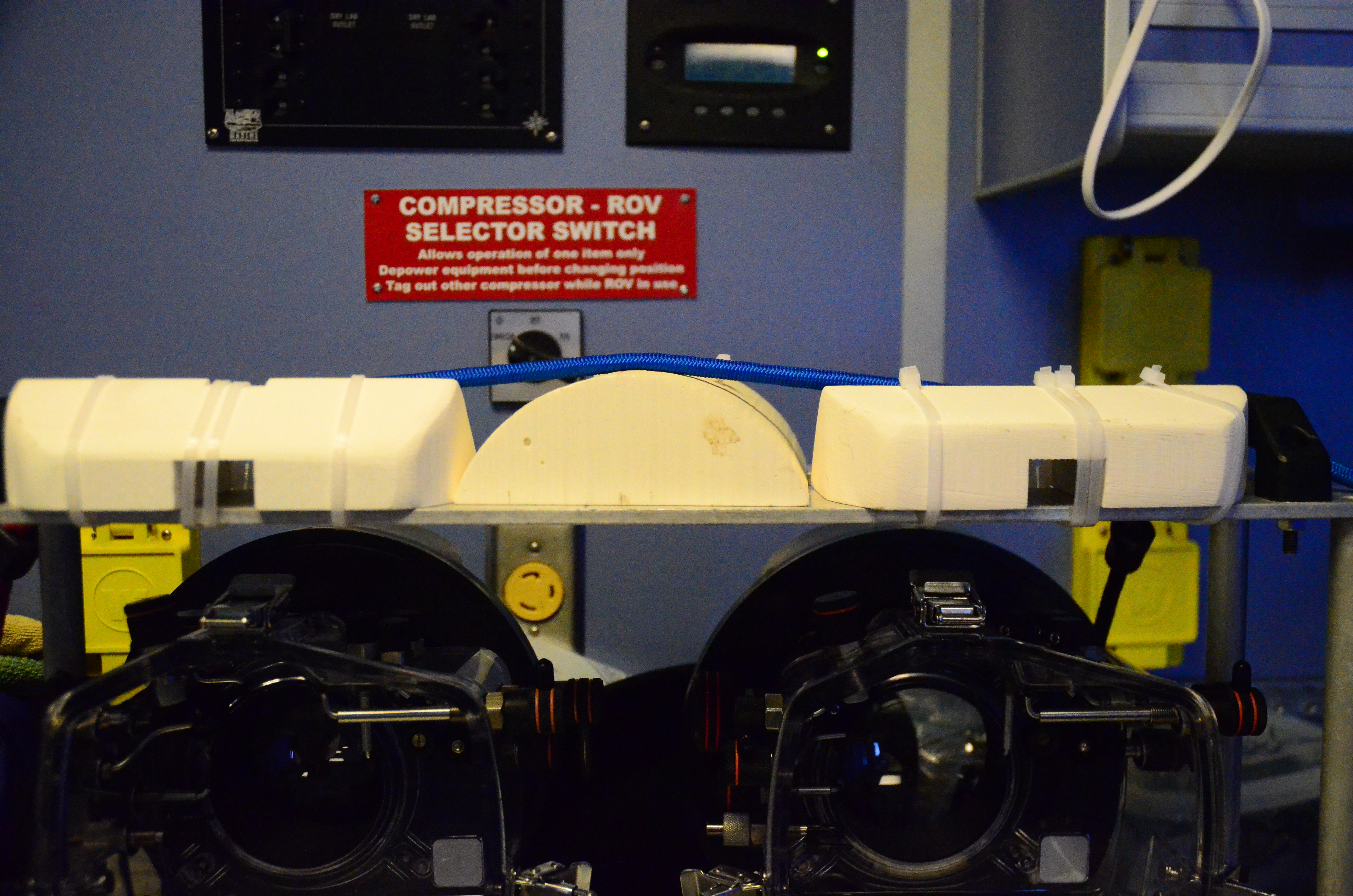
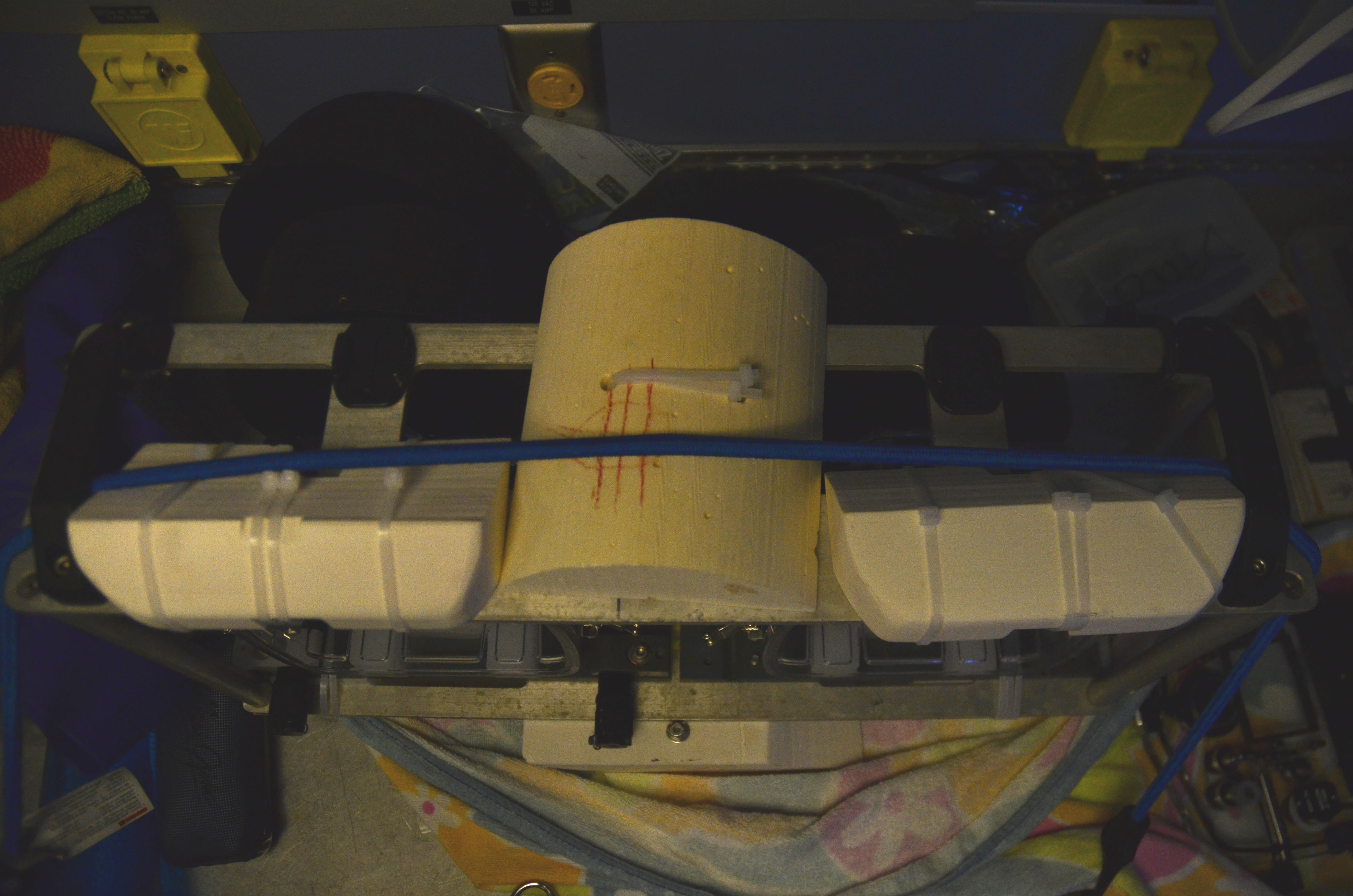
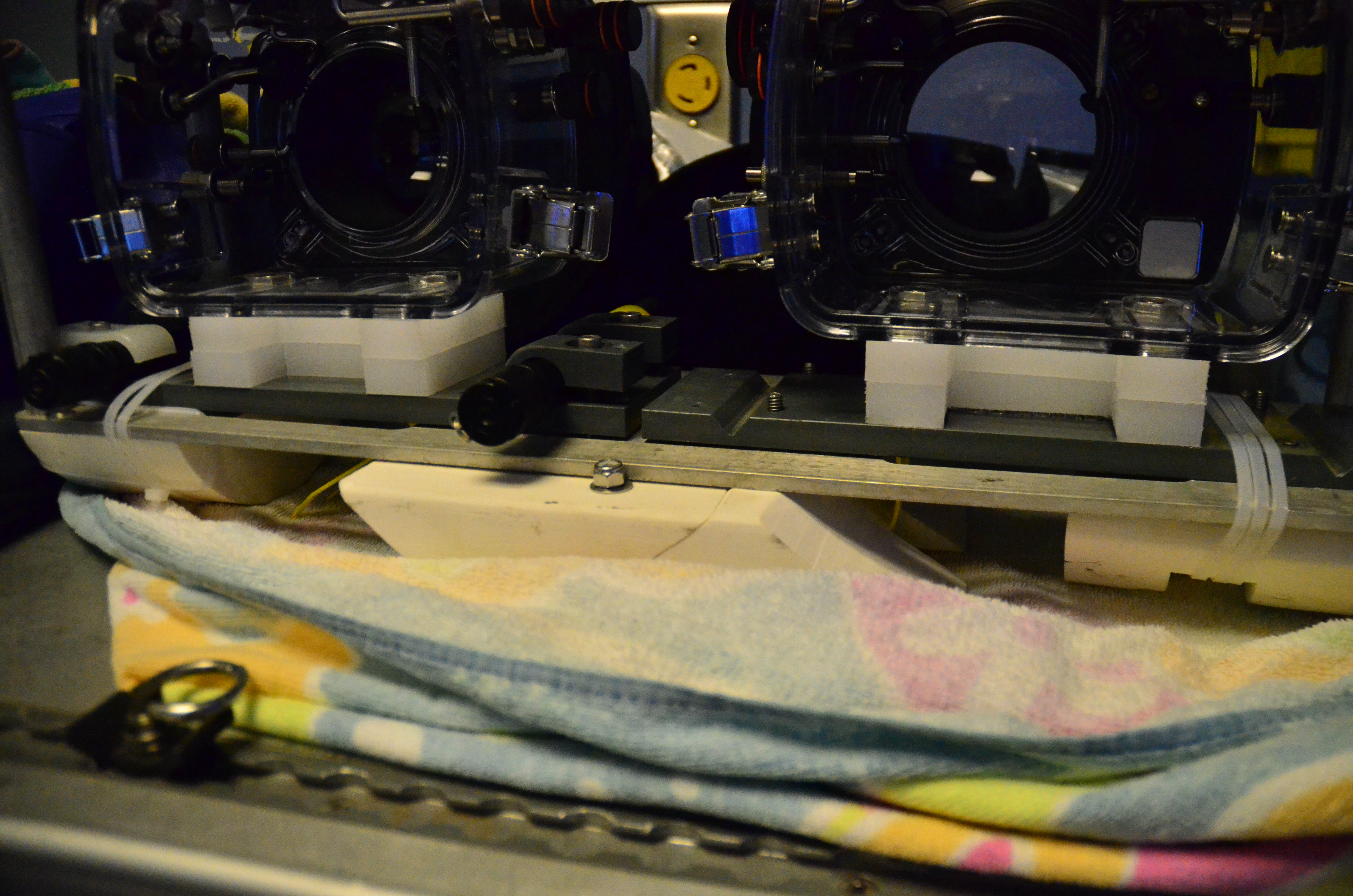
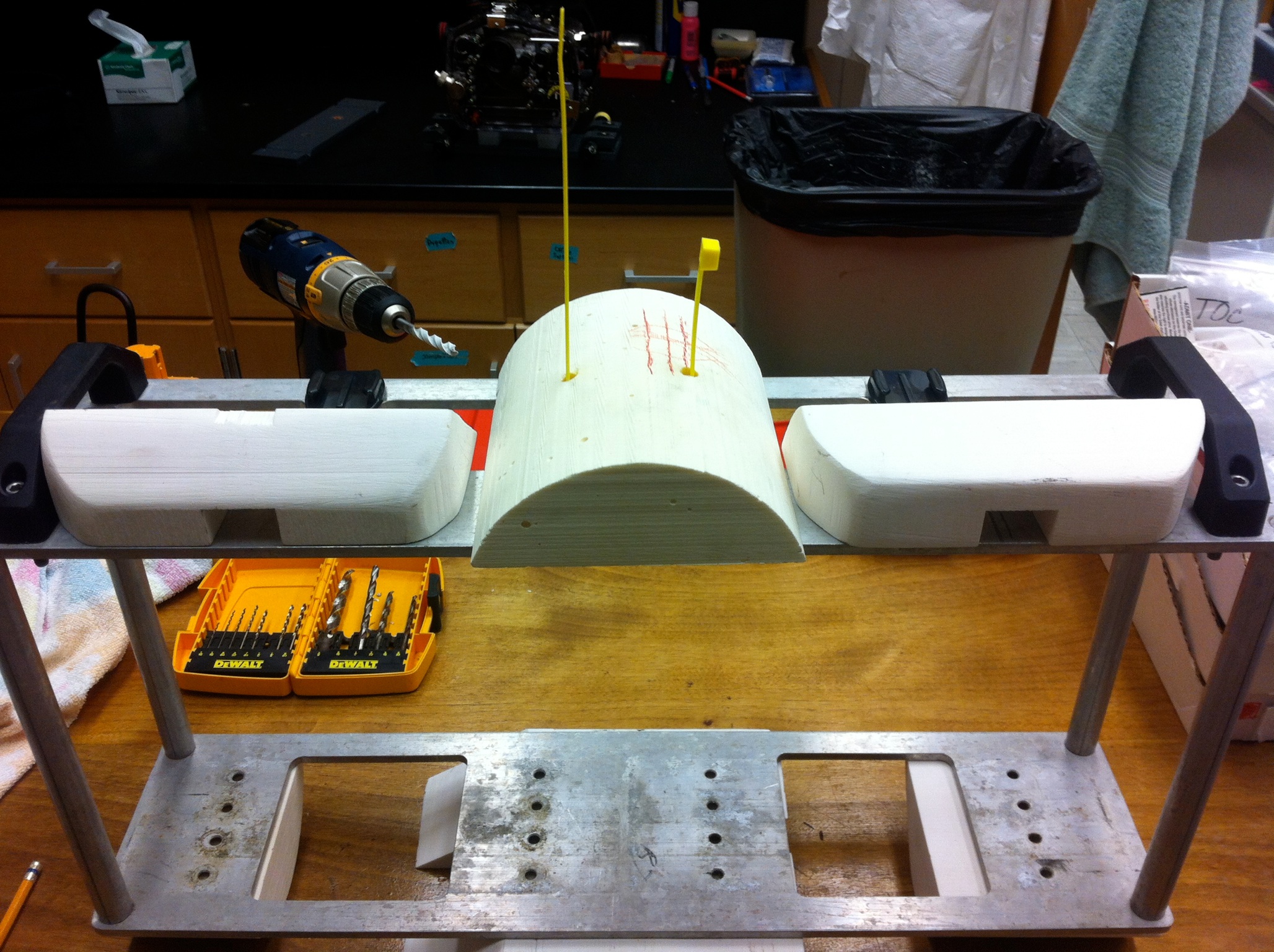
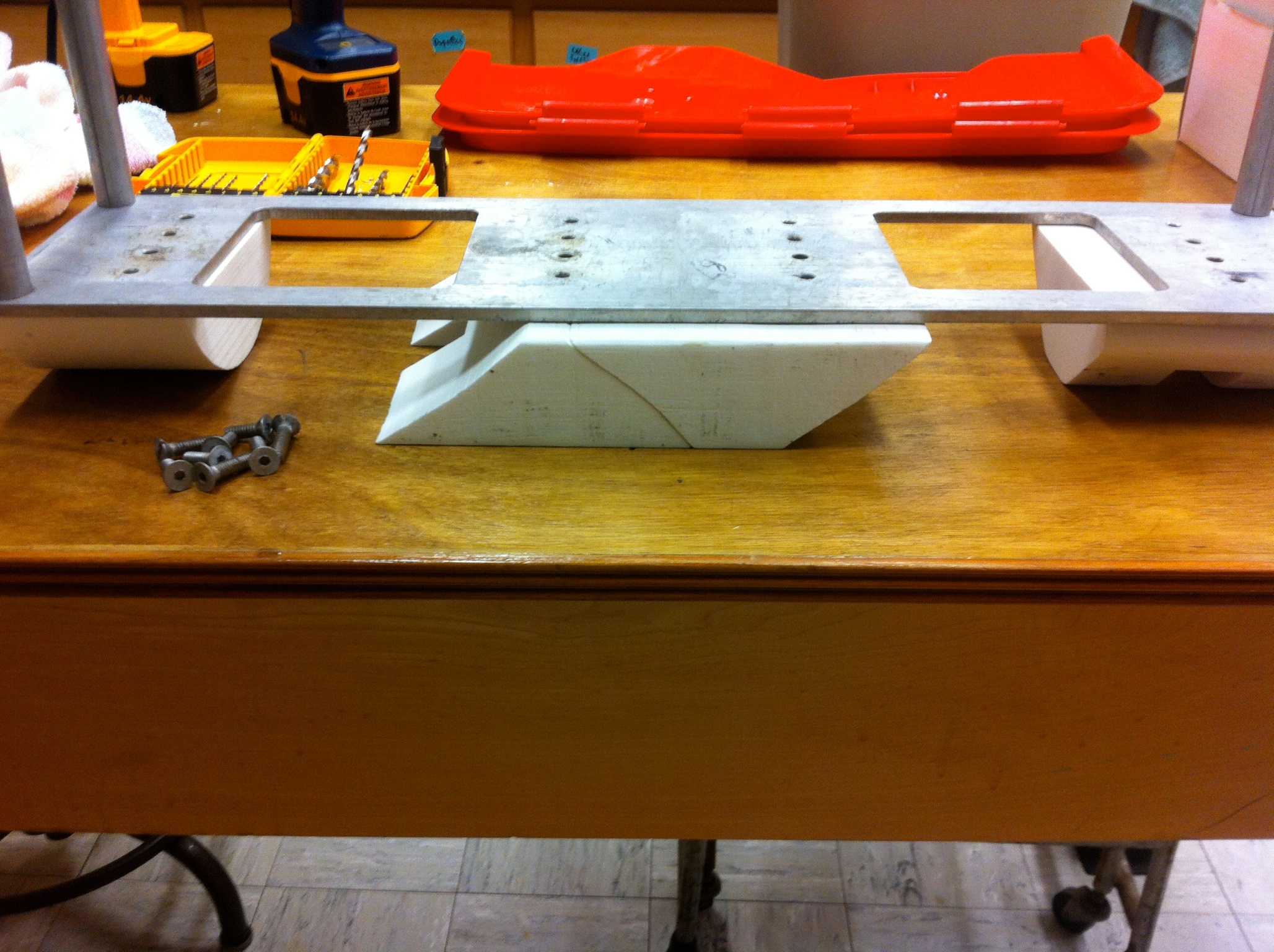
We've used this frame with 3 or 4 different types of video cameras + one Nikon D200. Then, with two D200s. Ultimately, we switched to dual D7000 cameras. Note that there are multiple pads on the top used to secure GoPro Hero cameras, which we almost always use, even if only as a backup. Note also that we have a pair of scaling lasers mounted under one of the cameras (typically the more zoomed-in camera). The first set of pictures shows the frame itself and measurements that may be useful to replicate it. Note this frame is a bit negatively buoyant. The first few pictures shows some green foam that we used at the time to help neutralize the buoyancy. Eventaully, we did a better job of this by adding some scraps of syntactic foam to make the rig neutrally buoyant and also stable in a downward pointing configuration. This was very helpful because it allows holding the frame easily with one hand while still collecting imagery (one does occasionally need a free hand to check depth or air etc..).
Gintert, B., N. Gracias, A. C. R. Gleason, D. Lirman, M. Dick, P. Kramer, and R. P. Reid, 2009: Second-Generation Landscape Mosaics of Coral Reefs. Proceedings of the 11th International Coral Reef Symposium, Ft. Lauderdale, Florida, 7-11 July 2008, 577-581.
Click on any image for a larger version...